VCANUS 범용 로봇 트랜스포메이션 - X
VURT-X는 산업용 및 협동 로봇의 가상 시뮬레이션과 직접 실시간 제어를 위한 범용 로봇 트랜스포메이션 플랫폼입니다. 수동 티칭 프로세스를 대체하고 기존 로봇 코드를 제거하여 직관적인 시퀀스 관리와 GUI 기반 직접 운용을 통해 더 빠른 배포, 더 높은 유연성, 단순화된 자동화를 실현합니다. VURT-X는 KUKA, Stäubli, FANUC, ABB, Rainbow Robotics 등 다양한 로봇 브랜드를 단일 공통 인터페이스로 관리하는 통합 플랫폼을 제공하여 브랜드별 프로그래밍의 필요성을 없앱니다. 또한 VURT-X는 Beckhoff PLC 기능을 통합하여 자동화 시스템에 필수적인 I/O 신호 제어(예: 램프, 스위치, 버튼)를 원활하게 지원합니다. 다양한 로봇을 운용하는 제조업체에게 VURT-X는 셋업 시간을 단축하고, 프로그래밍 복잡성을 최소화하며, 운영 효율성을 향상시켜 로봇 배포 및 관리를 더 체계적이고 비용 효율적으로 만들어 줍니다.
범용 로봇 트랜스포메이션이 필요한 이유
기존 로봇 프로그래밍은 티치 펜던트와 수동 코딩에 의존하며, 시간이 많이 걸리고 오류가 발생하기 쉬우며 유연성이 낮습니다. 이 방식은 배포를 지연시킬 뿐만 아니라 특히 여러 로봇을 관리할 때 유지보수 노력을 증가시킵니다. VURT-X는 다음과 같이 이러한 문제를 해결합니다:
- GUI 기반 직접 제어를 통해 수동 티칭을 제거합니다.
- 자동화된 시퀀스 관리로 기존 로봇 코드를 없앱니다.
- 경로 검증 및 충돌 감지를 위한 가상 시뮬레이션을 지원합니다.
- 정밀한 운용과 진단을 위한 실시간 모니터링 및 3D 시각화를 제공합니다. 분산된 브랜드별 워크플로우를 통합되고 확장 가능한 솔루션으로 대체함으로써 VURT-X는 배포를 가속화하고, 엔지니어링 오버헤드를 줄이며, 생산성을 향상시킵니다.
VURT-X로 할 수 있는 것
VURT-X를 통해 사용자는 다음을 수행할 수 있습니다:
- 가상 환경에서 모션 경로를 시뮬레이션 및 검증하고 충돌을 감지합니다.
- 티치 펜던트 없이 직관적인 GUI를 통해 로봇을 직접 운용합니다.
- 조율되고 고정밀한 작업을 위해 로봇과 외부 시스템 움직임을 동기화합니다.
- 3D 시각화로 로봇 상태를 실시간으로 모니터링합니다.
- 포인트 투 포인트 모션 및 커스텀 작업(예: 픽앤플레이스, 검사, 포장, 라벨링)을 포함한 시퀀스를 생성, 시뮬레이션 및 실행합니다.
- 고급 자동화 로직을 위한 임베디드 PLC를 프로그래밍하고 활용합니다.
주요 기능
로봇 호환성
- 산업용 로봇: KUKA, Stäubli, FANUC, ABB 등
- 협동 로봇: Rainbow Robotics, 두산로보틱스, Neuromeka
가상 시뮬레이션
- 사용자 정의 3D 모델 관리 (공구, 타겟, 장애물).
- 모션 실현 가능성 검증 및 충돌 감지.
- 시퀀스 시뮬레이션 및 검증.
직접 운용
- 수동/자동 운용 모드.
- 조그, 급속 이송, 직선, 관절 모션.
- 포인트 투 포인트 및 관절각도 모션 제어.
실시간 제어 & 동기화 모션
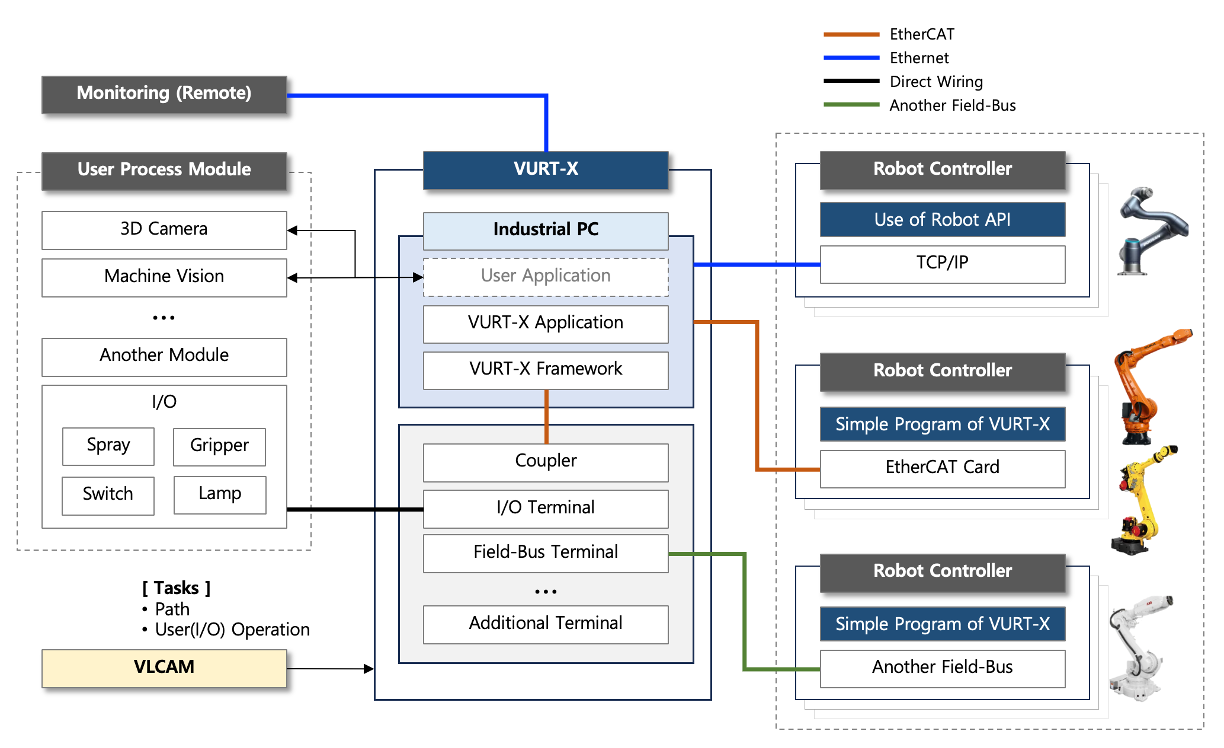
- 외부 시스템과의 데이터 교환 (EtherCAT, TCP/IP, Beckhoff ADS).
- 사이클 타임: 4–10 ms (로봇 및 프로토콜에 따라 다름).
- 다축 조율을 위한 속도 및 위치 동기화.
실시간 모니터링 & 3D 시각화
- 로봇 상태 실시간 모니터링 (관절각도, 위치 등).
- PLC 값 실시간 추적.
시퀀스 제어 & 작업 관리
- 시퀀스 제어 (시작, 정지, 일시정지, 리셋).
- 작업 생성, 등록, 관리 (포인트 투 포인트 모션, PC 또는 PLC 연동 커스텀 작업).
- 안전한 작업 실행을 위한 인터록 설정.
높은 확장성
- CAM 소프트웨어 통합을 통한 자동 경로/시퀀스 생성.
- 계측 장비 호환성 (3D 비전, ToF 카메라, 스테레오 카메라 등).
PLC 프로그래밍 & 활용
- 지원 언어: LD (래더 다이어그램), FBD (기능 블록 다이어그램), ST (구조화 텍스트), SFC (순차 기능 차트), C/C++.
- 원활한 자동화 로직 통합을 위한 PLC 파라미터 읽기/쓰기.
오류 관리
- 오류 보상 (셋업 오류: 좌표 보상; 위치 오류: 3D 테이블 기반 보상).
- 오류 테이블 관리 (등록, 업데이트).
로봇 시스템 중앙 제어 (엔터프라이즈 에디션)
- 공통 인터페이스와 사용자 친화적 GUI를 통한 멀티 브랜드 로봇 통합.
- 개별 펜던트 없이 여러 로봇에 대한 실시간 시퀀스 제어.
- 3D 시각화로 전체 공장 바닥을 통합 모니터링.